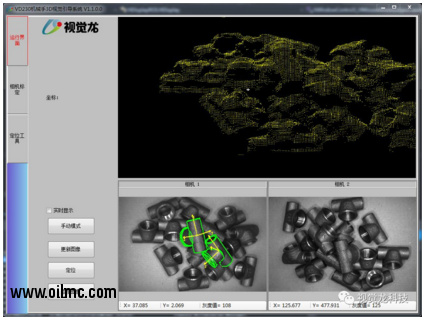


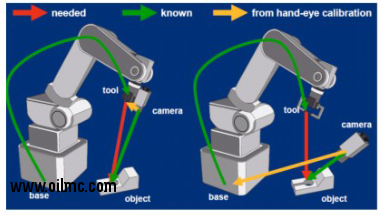
核心算法:
机械手与相机的手眼标定;多姿态,自动标定;基于透视成像原理的模板匹配算法以及空间点云匹配算法。
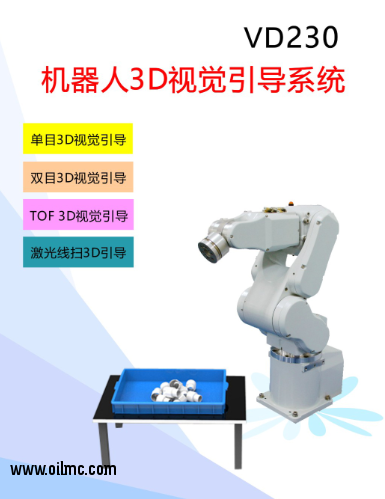
特点:
● 单目3D视觉引导:系统性价比极高,定位速度快;
● 双目3D视觉引导:适用范围广,精度高;
● TOF 3D视觉引导:速度快,适用范围广;
● 支持3D模型导入建模,支持点云导入建模。
可应用场景
● 料框堆叠物体的立体识别定位;
● 工件的散乱、无序来料定位抓取;
● 曲面容器里工件上下料定位;
● 多品种工件的机器人3D抓取上料定位;
● 复杂多面工件的柔性化3D抓取定位;
● 等等。